INDIA'S FIRST
FULLY OPEN
SOURCE
TRI-MODE FCU
Under a unified architecture.
A fully open source tri-mode Flight Control Unit. All in the making by a community of passionate innovators and contributors.
FULLY OPEN SOURCE
Schematics, PCB, firmware, and docs — all open. No locks. No secrets.
TRI-MODE SUPPORT
Fixed Wing, VTOL, Multirotor. One FCU. Any platform.
UNIFIED ARCHITECTURE
One design. Maximum compatibility. Infinite possibilities.
BUILT BY COMMUNITY
By innovators. For innovators. Forever improving.
One FCU. Three Modes.
Infinite possibilities.
FIXED WING
Optimised PID loops for fixed-wing aerodynamics, with full support for traditional rudder, elevator, and aileron configurations.
VTOL
Seamless transition logic between hover and cruise modes. Handles tilt-rotor, tailsitter, and hybrid VTOL configurations.
MULTIROTOR
Proposed multirotor firmware with support for quadcopters, hexacopters and custom frame geometries.
"All three modes. One unified codebase. One community."
FULLY OPEN. FULLY YOURS.
Every schematic, every firmware commit, every PCB layout remains open to the world. Fork it, improve it, build on it. No CLAs. No commercial locks. Just open collaboration. FOREVER.
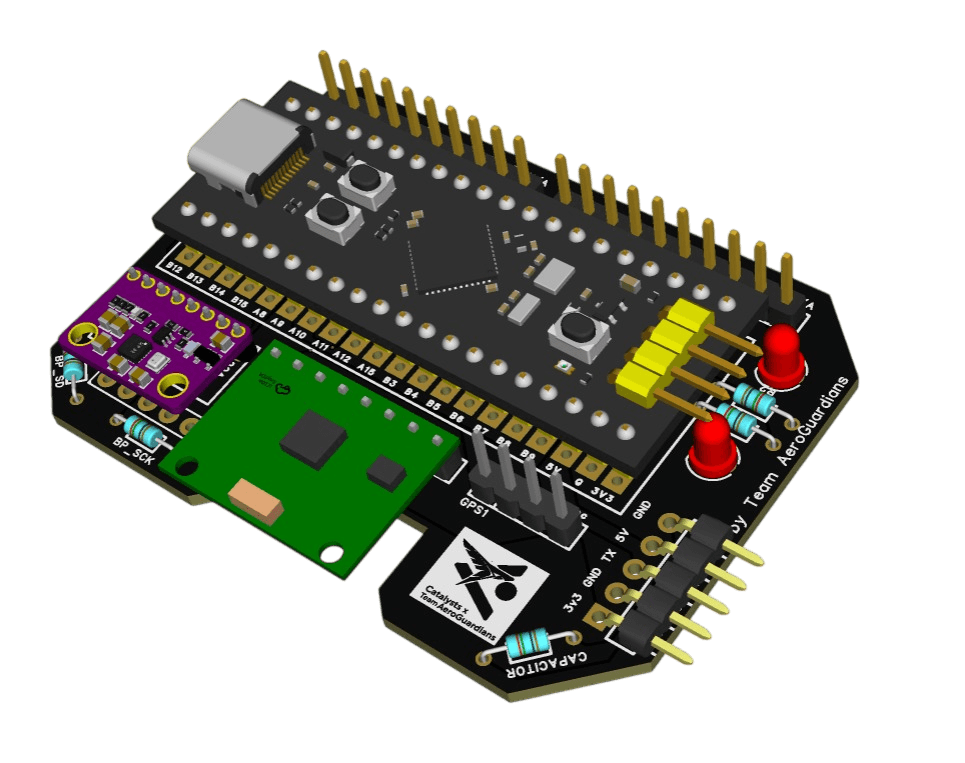
3D Renders
Visualizing the through-hole prototype board architecture
Top Assembly Render
3D CAD render highlighting the top components placement, including the MCU, sensor array, and high-profile connectors of the Through-Hole (TH) PCB design.
Isometic Assembly
Angled perspective render showing the spatial layout and structural height clearance of the discrete capacitors, headers, and shield components.
Bottom Component Layout
First iteration of TH boards displaying trace routing geometry, ground planes, and bottom-side auxiliary components designed for ease of hand-soldering and community debugging.
ACCESS THE BLUEPRINTS
Comprehensive tools and reference guides for developers and hardware engineers
REFERENCE MANUALS
Explore the comprehensive developer guides, API references, configuration manuals, and hardware specs.
INTERACTIVE SCHEMATICS
Explore our interactive 3D PCB layout viewers, download schematic PDFs, and check trace designs.
FIRMWARE BINARIES
Download ready-to-flash binaries, view compilation steps, and get the core board support package source.
DEVELOPMENT TIMELINE
Software Development (SW)
Quad / Multirotor
Quad (core)
Active BetaAddition of extra flight modes
Acro, Stabilize, Basic Altitude hold
Additional Controller tuning
Quad specific telemetry items
Fixed Wing
Fixed wing (core)
Active BetaAddition of extra flight modes
Manual, Stabilize, FBWA, Circle
Additional Controller tuning
FW specific telemetry items
Additional RC protocol support
SBUS, IBUS
VTOL (core)
Transition logic
Development of In-situ + Transition flight dynamics
Additional controller tuning
Autonomous modes (TBD)
Hardware Design (HW)
Core component selection
Creation of Proto-PCB on Zero PCBs
Validation
Creation of Module based TH PCB
Validation
Creation of full SMD based PCBs with miniaturization
OngoingValidation
Indigenization of components
BUILT BY THE COMMUNITY
Join a growing team of engineers, pilots, and open-source enthusiasts.
CONTRIBUTE CODE
Submit PRs, fix bugs, build features. All skill levels welcome.
REPORT ISSUES
Help us find and squash problems. Open an issue on GitHub.